mirror of
https://github.com/LuiCat/ArduinoTaikoController.git
synced 2024-12-18 09:35:52 +01:00
146 lines
6.9 KiB
Markdown
146 lines
6.9 KiB
Markdown
|
|
(中文教程重写还在进行中)
|
|||
|
|
|
|||
|
|
## 软件配置
|
|||
|
|
|
|||
|
|
### Arduino IDE
|
|||
|
|
|
|||
|
|
在Arduino官网下载Arduino IDE这款软件,用来上传代码到Arduino板:[https://www.arduino.cc/en/Main/Software?setlang=cn](https://www.arduino.cc/en/Main/Software?setlang=cn)
|
|||
|
|
|
|||
|
|
### 软件魔改与Nintendo Switch相关
|
|||
|
|
|
|||
|
|
如果想要启动对Nintendo Switch的控制支持,你需要对Arduino IDE进行魔改。在setup文件夹找到HID.h和HID.cpp文件,替换掉如下位置的两个文件:
|
|||
|
|
|
|||
|
|
- `<Arduino IDE安装文件夹>/hardware/arduino/avr/libraries/HID/src/HID.h`
|
|||
|
|
- `<Arduino IDE安装文件夹>/hardware/arduino/avr/libraries/HID/src/HID.cpp`
|
|||
|
|
|
|||
|
|
之后将boards.txt的文件内容复制并粘贴到这个文件的末尾:
|
|||
|
|
|
|||
|
|
- `<Arduino IDE安装文件夹>/hardware/arduino/avr/boards.txt`
|
|||
|
|
|
|||
|
|
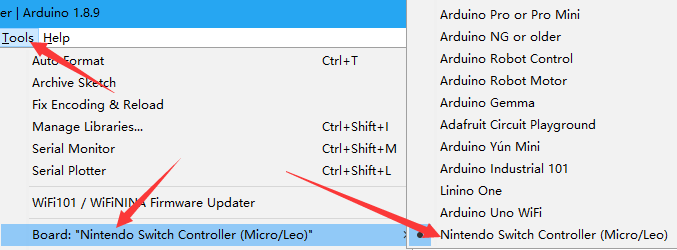
上面的步骤完成后,下次启动Arduino IDE的时候应当可以在开发板中找到“Nintendo Switch Controller”这个选项:
|
|||
|
|
|
|||
|
|
|
|||
|
|
|
|||
|
|
如果需要启动Nintendo Switch相关功能,请务必将此项选为开发板,并且注意选择合适的上传端口(上传之后端口可能会变化)。
|
|||
|
|
|
|||
|
|
### Keyboard or Nintendo Switch Controller
|
|||
|
|
|
|||
|
|
To enable or disable keyboard and Nintendo Switch controller functionality, remove or add two charactors "//" before these two lines in taiko_controller.ino:
|
|||
|
|
|
|||
|
|
- To enable Switch controller only
|
|||
|
|
```
|
|||
|
|
//#define ENABLE_KEYBOARD
|
|||
|
|
#define ENABLE_NS_JOYSTICK
|
|||
|
|
```
|
|||
|
|
- To enable keyboard only
|
|||
|
|
```
|
|||
|
|
#define ENABLE_KEYBOARD
|
|||
|
|
//#define ENABLE_NS_JOYSTICK
|
|||
|
|
```
|
|||
|
|
- To enable both (not tested)
|
|||
|
|
```
|
|||
|
|
#define ENABLE_KEYBOARD
|
|||
|
|
#define ENABLE_NS_JOYSTICK
|
|||
|
|
```
|
|||
|
|
|
|||
|
|
## Circuit Setup
|
|||
|
|
|
|||
|
|
### Materials
|
|||
|
|
|
|||
|
|
To setup the circuit, you need an Arduino Leonardo, a set of four piezo sensors, and four 1MΩ resistors for some special cases.
|
|||
|
|
|
|||
|
|
### Connect the Circuit
|
|||
|
|
|
|||
|
|
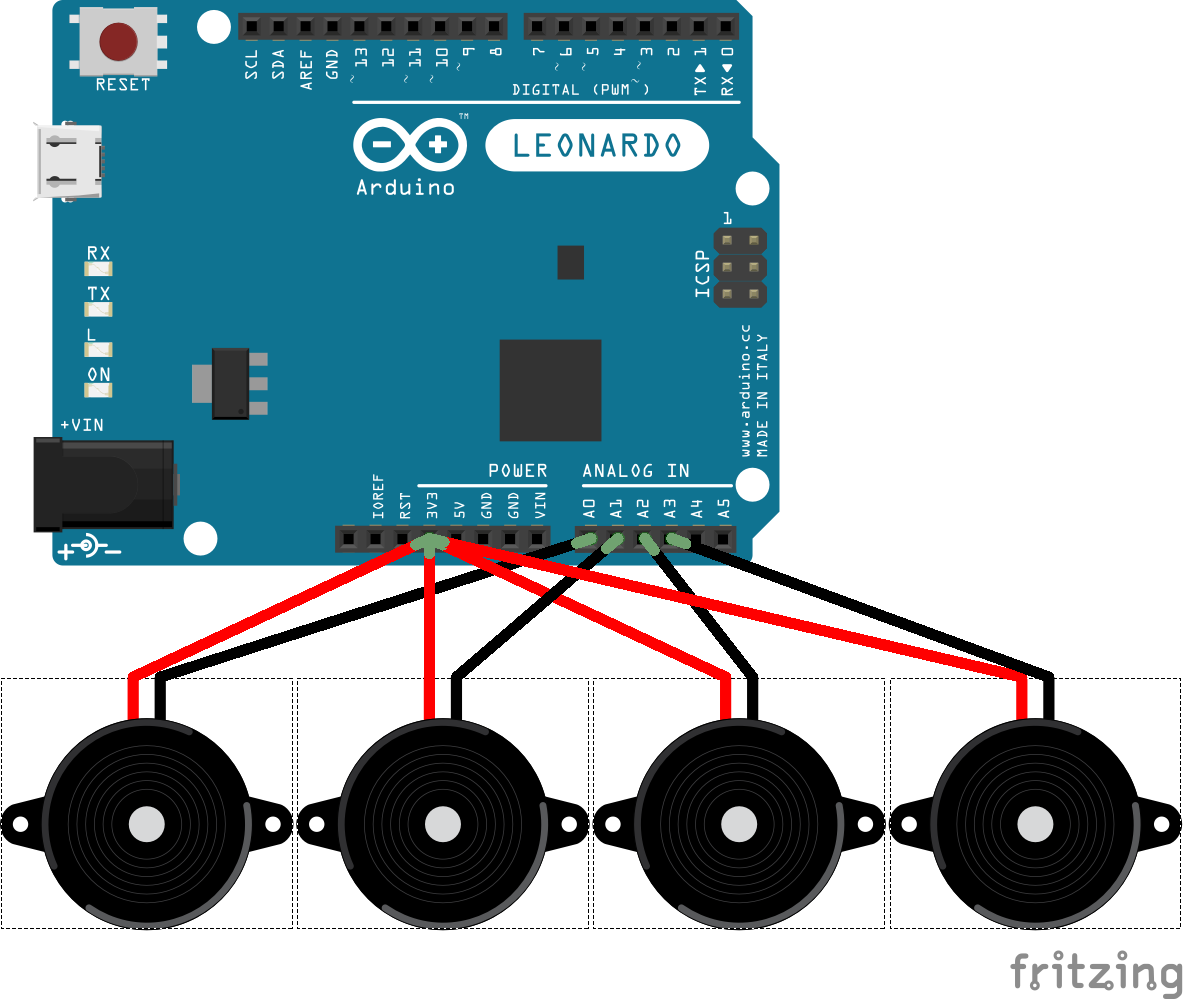
Connect the sensors to the 3.3v pin and the analog pins according to the diagram below:
|
|||
|
|
|
|||
|
|
|
|||
|
|
|
|||
|
|
The mapping of the sensors by default should be:
|
|||
|
|
|
|||
|
|
- Left Rim: A0
|
|||
|
|
- Left Surface: A3
|
|||
|
|
- Right Surface: A1
|
|||
|
|
- Right Rim: A2
|
|||
|
|
|
|||
|
|
To customize the mapping, checkout the [parameter](#parameters-with-suggested-values) section.
|
|||
|
|
|
|||
|
|
For most of the times, pluging the sensors directly into Arduino's pins will work.
|
|||
|
|
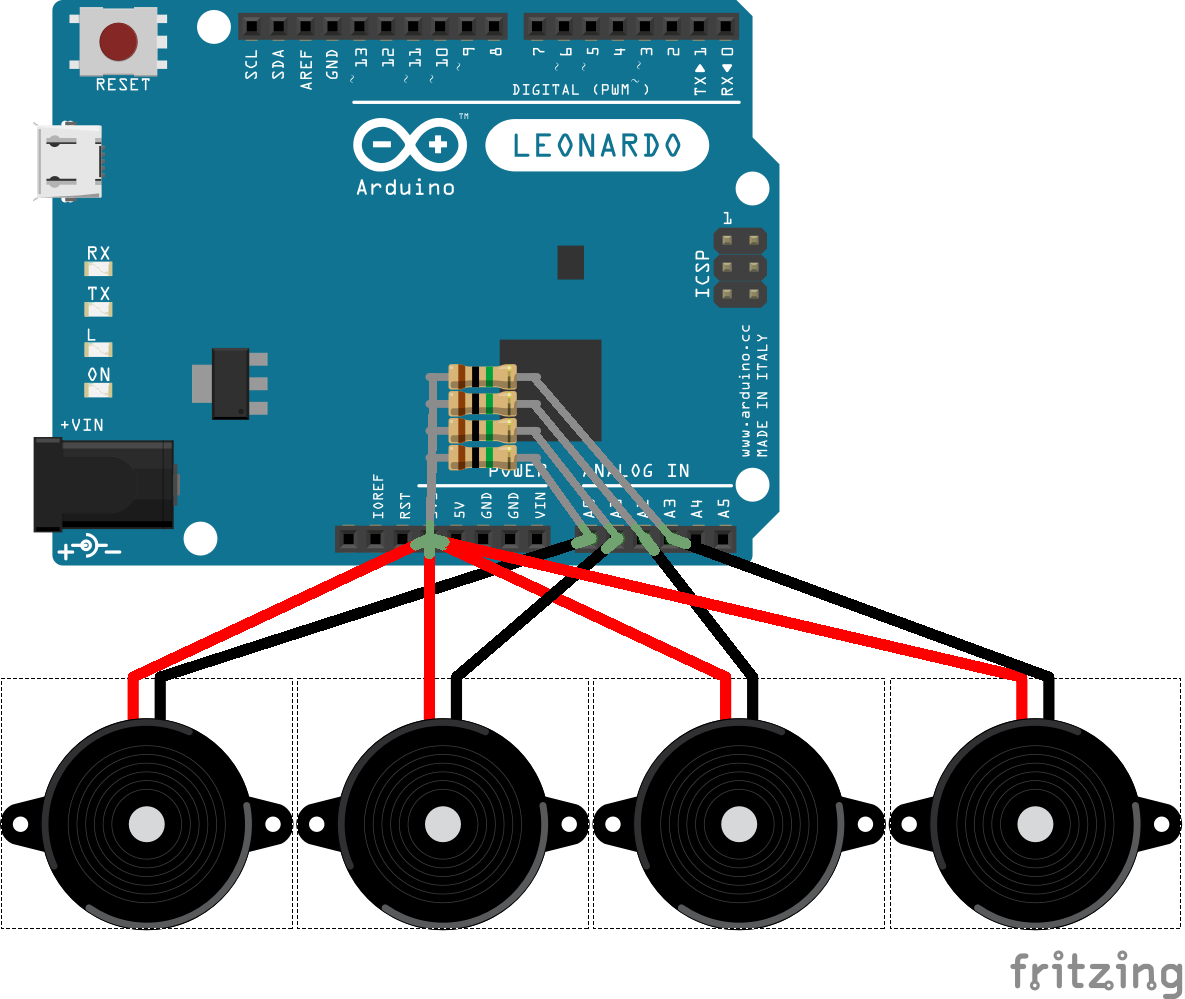
If the controller seems to be generating random inputs, you can fix this by plugging some 1MΩ resistors in parallel:
|
|||
|
|
|
|||
|
|
|
|||
|
|
|
|||
|
|
### Notes
|
|||
|
|
|
|||
|
|
For best performance, the sensors must be piezo sensors (a.k.a. piezo speakers, contact microphones). No guarantee if other types of sensors will simply work, but if analog signals with voltage ranged 0-5V are fed into analog pins, this setup should be good to go.
|
|||
|
|
|
|||
|
|
For further improvements, you can use some diodes to limit the voltage of the piezo sensors, or use a 2.5v power supply, but this won't matter in most cases, at least on my side.
|
|||
|
|
|
|||
|
|
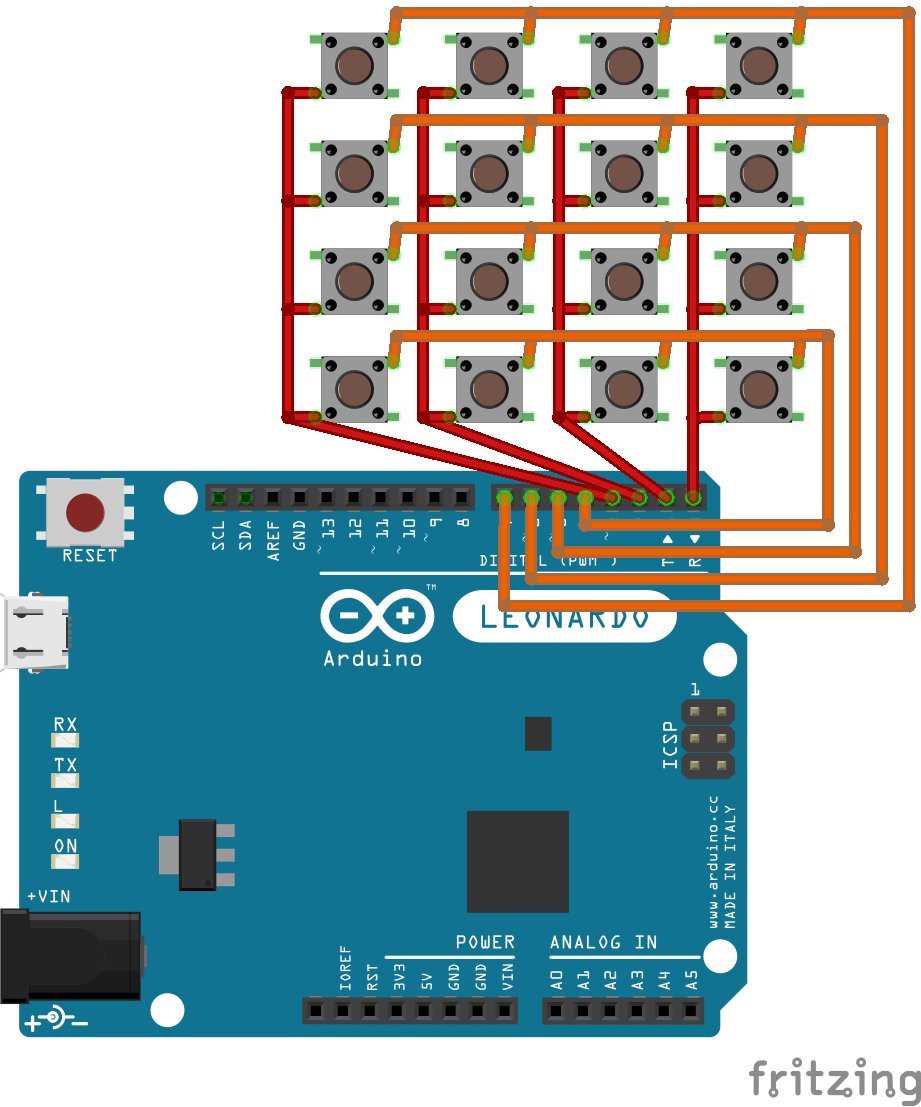
If you can somehow connect a 4x4 matrix keyboard (no pull-up resistors needed) to Arduino's digital pin 0-15, it will work as a controller along with the drum:
|
|||
|
|
|
|||
|
|
|
|||
|
|
|
|||
|
|
## Algorithm
|
|||
|
|
|
|||
|
|
This sketch uses a dynamic threshold of sensor levels to trigger inputs. Whenever the sensor level from one sensor is higher than the threshold, a keyboard or Nintendo Switch controller input is generated, then the sensors will be put into a cooldown period. When an input is triggered or during cooldown period, the threshold will be raised to a ratio of current sensor levels, and after that the threshold will gradually decay by ratio, to hopefully be an envolope of the waves of sensor levels.
|
|||
|
|
|
|||
|
|
As the sensors should have biased input voltages, the sensor levels are actually the differential value of the analog value from ```analogRead```.
|
|||
|
|
|
|||
|
|
To deal with four analog inputs, we read the sensor levels one at a time, and only do the triggering mechanisms for this sensor. To compensate the time difference, the sensor level for the current one will be a mix of values from previous read and current read. Also, a non-default non-blocking version of ```analogRead``` is used to guarantee more stablization time after a channel switch of arduino's internal ADC chip.
|
|||
|
|
|
|||
|
|
To deal with Nintendo Switch, I used the HID descriptor for Hori's Pokken fightstick to let Switch trust Arduino as a valid controller device (see the [credits](#credits) section). The default buttons from the four sensors are the analog stick buttons (press the sticks down) and the trigger buttons (ZL and ZR).
|
|||
|
|
|
|||
|
|
As VID and PID of the controller have to be the specific value, the setup to boards.txt is essential. Also, Switch seems also to be judging the device strictly by the first-come HID descriptor of the device, so Arduino's default HID behavior have to be altered to have our customized HID descriptor to work.
|
|||
|
|
|
|||
|
|
## Parameters (with suggested values)
|
|||
|
|
|
|||
|
|
#### min_threshold = 15
|
|||
|
|
The minimum value for sensor levels to trigger inputs for all sensors.
|
|||
|
|
|
|||
|
|
To determine an optimal value for this level, try enabling debug info.
|
|||
|
|
Usually, this value is only used to ignore sensor noises, but you can use this level as a sensitivity level.
|
|||
|
|
|
|||
|
|
#### cd_length = 10000
|
|||
|
|
The cooldown length of sensors, in microseconds (=1x10^-6s).
|
|||
|
|
|
|||
|
|
While a sensor is in its cooldown period, no input will be triggered ignoring the sensor level. The threshold level would still be updated if the sensor levels go high.
|
|||
|
|
During the cooldown period, the corresponding key of the sensor is kept pressed. When it ended, the key is released.
|
|||
|
|
|
|||
|
|
#### k_threshold = 1.5
|
|||
|
|
How much the threshold value is raised to, in ratio to the sensor level.
|
|||
|
|
|
|||
|
|
#### k_decay = 0.97
|
|||
|
|
How fast every threshold level decays, in ratio per refresh (about 300ms).
|
|||
|
|
|
|||
|
|
For every refresh, the threshold value is multiplied by k_decay.
|
|||
|
|
|
|||
|
|
#### pin[4] = {A0, A3, A1, A2}
|
|||
|
|
The analog input pins of four sensors.
|
|||
|
|
|
|||
|
|
#### key[4] = {'d', 'f', 'j', 'k'}
|
|||
|
|
The key mapping of four sensors, if keyboard inputs are enabled.
|
|||
|
|
|
|||
|
|
#### sens[4] = {1.0, 1.0, 1.0, 1.0};
|
|||
|
|
Sensitivity of every sensor. All sensor levels are scaled by these values respectively before use.
|
|||
|
|
|
|||
|
|
## Debug Info
|
|||
|
|
|
|||
|
|
If the line ```#define DEBUG_OUTPUT``` is enabled, there will be debug info printed via serial. Take a look at your serial monitor.
|
|||
|
|
|
|||
|
|
The first 4 columns indicate current vibration level of the four sensors, and the last column indicates the threshold level for a sensor to trigger a input;
|
|||
|
|
the symbols in the middle shows current status of the sensors, # for input triggered and * for cooldown state.
|
|||
|
|
|
|||
|
|
A typical output could be:
|
|||
|
|
|
|||
|
|
```
|
|||
|
|
0 3 13 63 | | 0
|
|||
|
|
51 2 11 58 | * * * # | 53
|
|||
|
|
83 5 9 24 | # * * # | 83
|
|||
|
|
```
|
|||
|
|
|
|||
|
|
## Credits
|
|||
|
|
|
|||
|
|
- This sketch make use of Arduino IDE and its useful library. A modified version of the Arduino library is used to allow us to make a valid Nintendo Switch controller.
|
|||
|
|
- The HID descriptor are a reverse engineering of Pokken Tournament Pro Pad of progmem's work: [progmem/Switch-Fightstick](https://github.com/progmem/Switch-Fightstick)
|
|||
|
|
- The HID descriptor are coded using many useful macros and functions from [LUFA Library](http://www.fourwalledcubicle.com/LUFA.php)
|
|||
|
|
|