4.7 KiB
Click here for English documentation

Taiko Drum Controller - Arduino (ATmega32U4/ESP32)
开源硬件程序,帮助你制作自己的太鼓达人PC控制器。
关于本项目
本项目旨在帮助你在家制作自己的硬件太鼓。
该程序仅供个人和非商业用途。
你需要准备
-
一个Arduino Micro/Leonardo (ATmega32U4) 板或一个Arduino Nano ESP (ESP32) 板。
大多数ATmega32U4板都可以工作,但你需要验证它们是否支持键盘模拟;像Arduino Uno这样的ATmega328P板则不行。
强烈推荐使用ESP32,因为它比ATmega32U4强大得多。该项目使用了ESP32-WROOM-32板。
-
4个压电传感器。
-
8个100kΩ电阻。
-
(可选)4个桥式整流器芯片,比如DB107(详见附加说明部分)。
-
(可选)一些红色和蓝色的LED灯。
-
必要的电子组件(面包板、LED灯、跳线等)。
-
木板和切割工具(仅在你需要从头开始制作实体太鼓时使用)。如果你有市售太鼓或大力鼓Lv.5,可以直接使用。
制作控制器的步骤
-
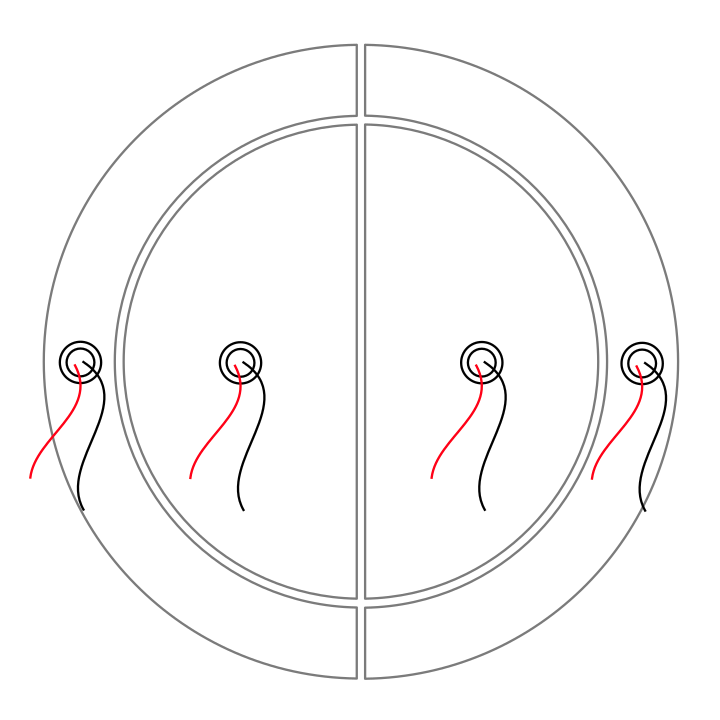
制作鼓,并将4个压电传感器牢固地粘贴在鼓上。参考图片以了解传感器的首选位置。
-
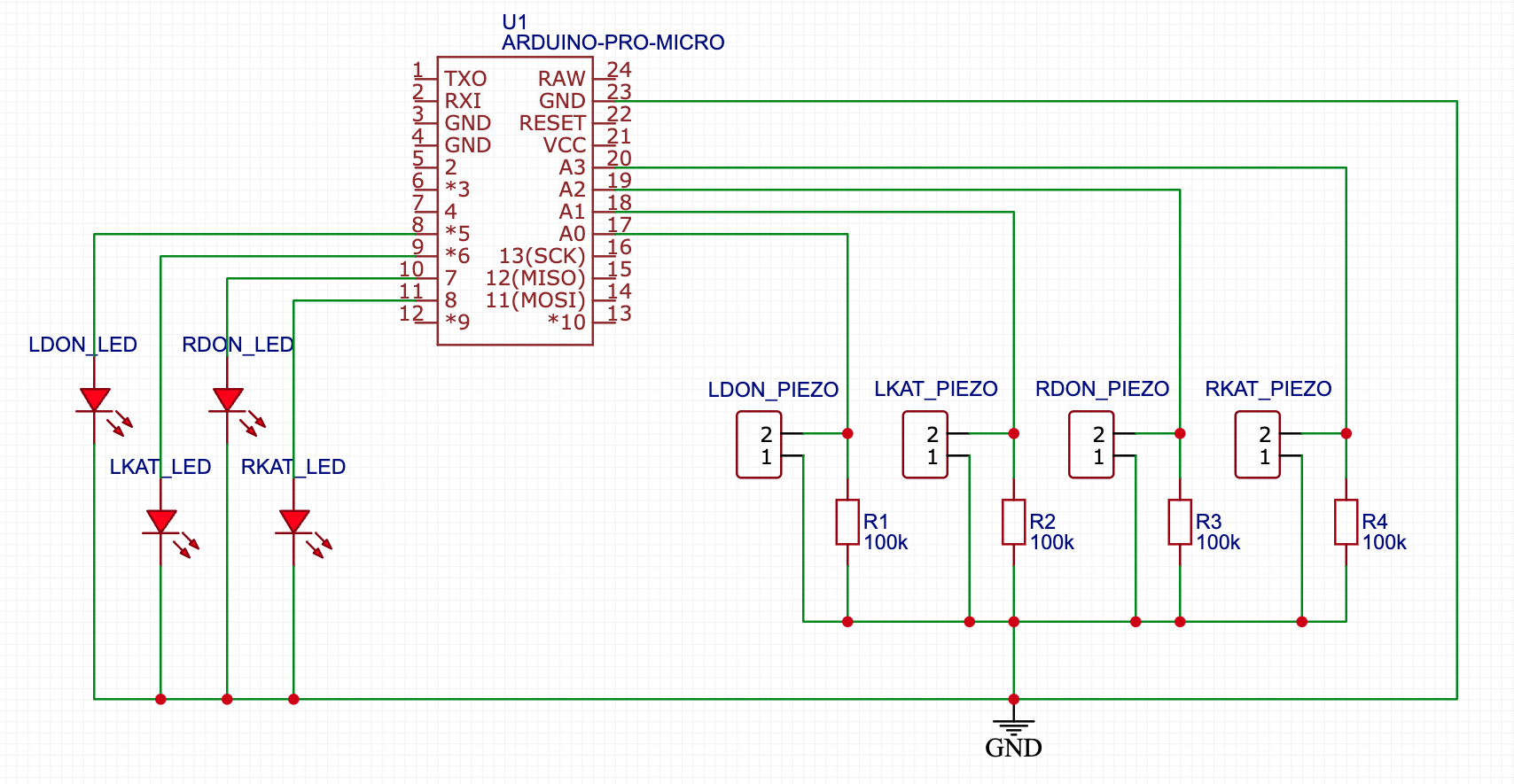
按照以下方案将压电传感器和其他组件连接到控制器(压电传感器的极性无关紧要);
以下方案适用于Arduino Micro板。如果你使用不同的板,请参考其文档了解连接信息。
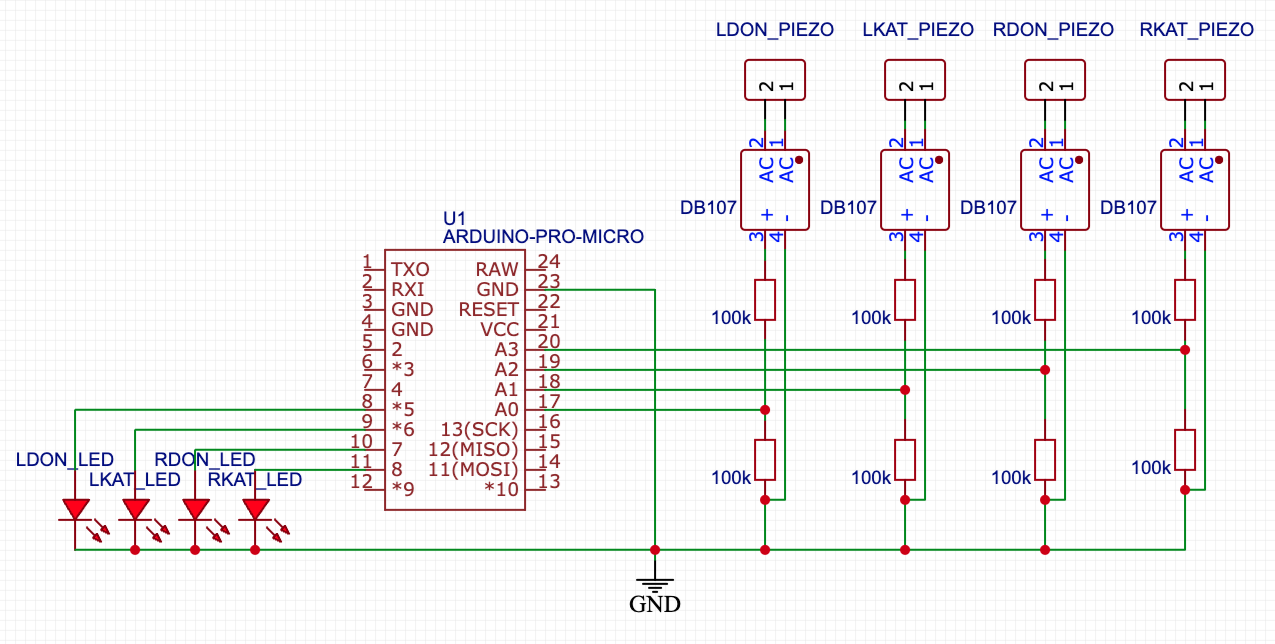
如果你选择添加桥式整流器,请使用以下方案:
-
将固件刷写到板上。
你可能需要微调一些参数,如
SAMPLE_CACHE_LENGTH、HIT_THRES、RESET_THRES和sensitivity。详见下一节。 -
玩得开心!
调整参数
-
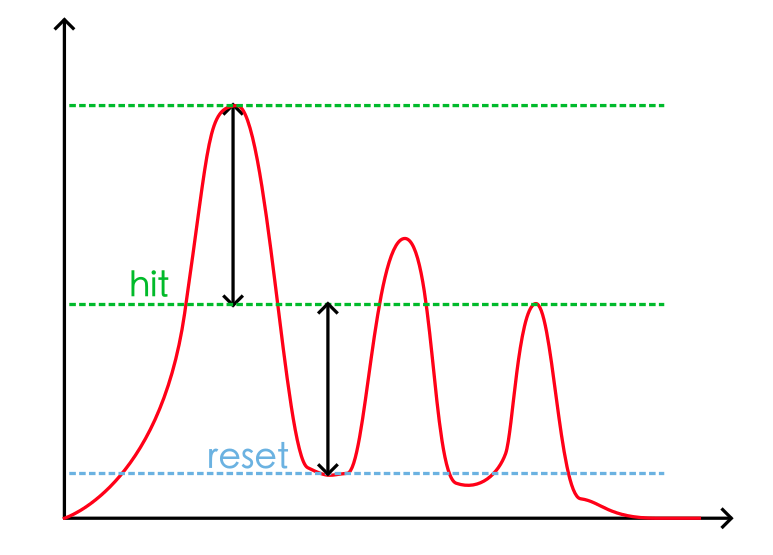
击打和重置阈值
设置
DEBUG 1(这会禁用键盘输出并从串行端口发送信号值),刷写固件,在鼓的4个区域之一上滚动,然后从串行监视器的输出中查看图表。击打阈值应低于你在鼓上的最重击打,重置阈值应高于连续击打之间的低谷。重置值也应低于击打值。为剩下的3个区域重复此过程,并找到适合所有区域的最佳值。
-
采样长度
为了最大化运行速度,
cache.h库已优化为支持2的幂次方窗口大小的SAMPLE_CACHE_LENGTH。这意味着2、8、16、32等。实际上,对于Arduino来说16是最佳值,但如果你有一个能以至少4000Hz或更高速度采样输入的强大微控制器,你可以将值改为32,以获得更平滑(换句话说,更少噪声)的曲线。 -
灵敏度
并非所有压电传感器都是相同的,由于安装错误,4个传感器捕获的信号可能有显著差异。灵敏度值是用来规范这些差异的乘数。在以下示例中,右边的don区域产生的值比其余3个区域高得多,所以你可以调整
sensitivity为{1.0, 1.0, 0.5, 1.0}来解决这个问题。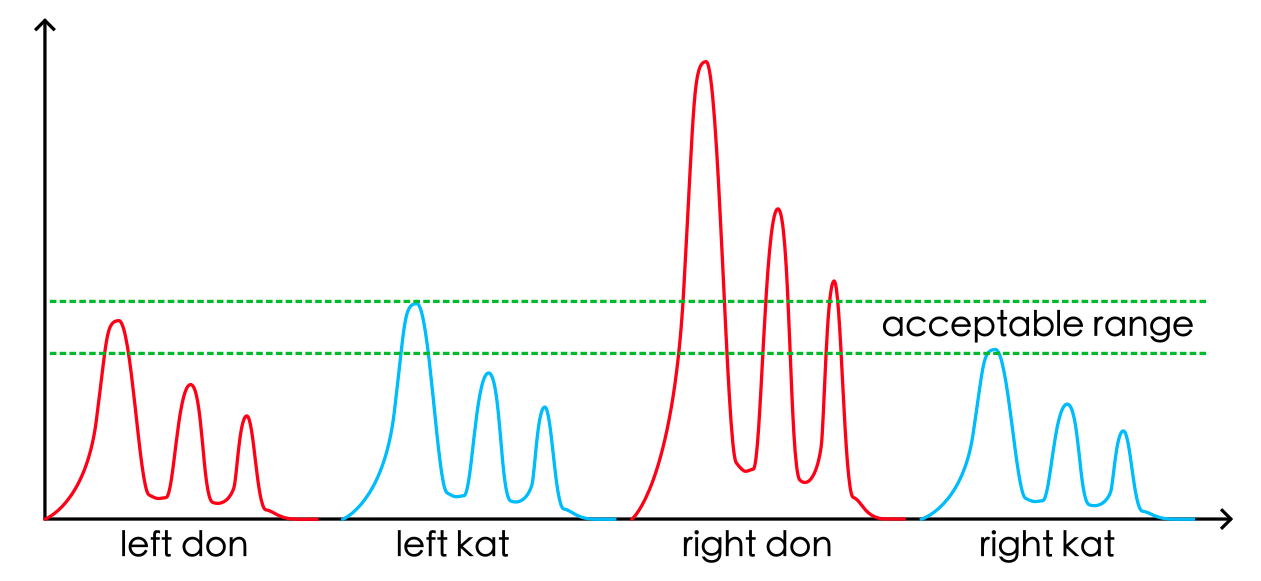
请注意,传感器的安装非常关键。你应该确保传感器牢固地贴在木头上,并且位置适当。
附加说明
-
为什么使用桥式整流器
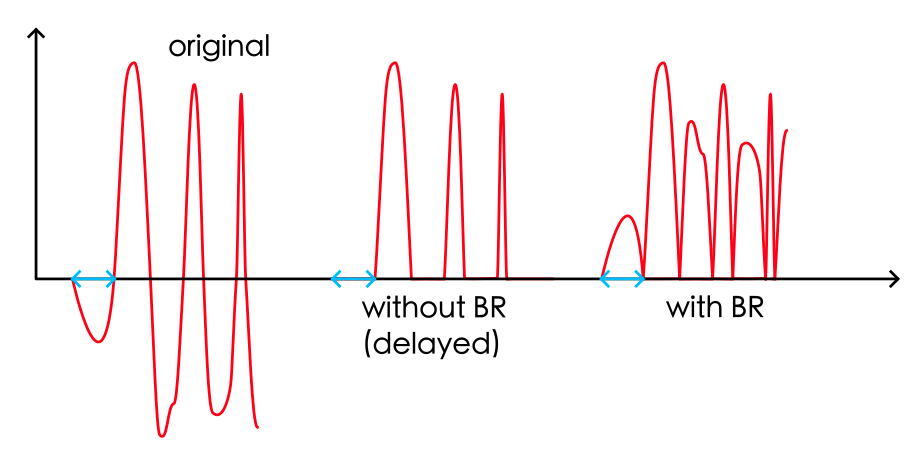
如果不对压电传感器的电压进行偏置,它们的输出电压范围约为-5V到+5V。然而,模拟输入的ADC只接受正电压值(ESP32为0-3.3V,ATmega32U4为0-5V)。当它们接收到负电压时,通常会被简单地截断为0。
对于普通的电子鼓来说,这通常没问题,因为我们只是失去了一半的输入能量,而这并不影响我们计算击打时间的方式。但是对于太鼓鼓来说,特别是像ATmega32U4这样的慢处理器,可能会造成问题。
在太鼓鼓中,所有4个振动部件都连接在一起,这意味着如果你击打左边的don,处理器也会接收到左边的kat、右边的don和右边的kat的信号。如果左边的don压电传感器一开始就产生负电压,并被ADC截断,它将导致约3到4毫秒的轻微“延迟”,处理器可能会错误地将这次击打视为右边的don、左边的kat甚至右边的kat,取决于哪个发送了最高的正值。
使用桥式整流器,所有负值都转换为正值。换句话说,就像
abs()函数,确保我们不会丢失任何负电压。