13 KiB
Geki Pico - 音击风格的迷你控制器
Click here for the English version of this guide.

特性:
- 它很小,但尽量还原街机控制器的感觉。
- 相当丝滑的摇杆,阻尼可以调节。
- 带有声音反馈悬空虚拟侧面按钮。
- IO4 模拟。
- 内置 AIME 卡读卡器。
- 命令行配置。
- 所有源文件开放。
感谢许多尊敬的爱好者和公司将他们的工具或材料免费或开源(KiCad,OnShape,InkScape,Raspberry 相关工具, 嘉立创,等)。
特别感谢社区项目和开发者的帮助。
- Robin Grosset (https://github.com/rgrosset/pico-pwm-audio)
- GEEKiDoS (https://github.com/GEEKiDoS/ongeeki-firmware)
- Pololu (https://github.com/pololu/vl53l0x-arduino, https://github.com/pololu/vl53l1x-arduino)
- RP_Silicon_KiCad: https://github.com/HeadBoffin/RP_Silicon_KiCad
- Type-C: https://github.com/ai03-2725/Type-C.pretty
其他项目
你也可以查看我其他的酷炫项目。









- Popn Pico: https://github.com/whowechina/popn_pico
- IIDX Pico: https://github.com/whowechina/iidx_pico
- IIDX Teeny: https://github.com/whowechina/iidx_teeny
- Chu Pico: https://github.com/whowechina/chu_pico
- Mai Pico: https://github.com/whowechina/mai_pico
- Diva Pico: https://github.com/whowechina/diva_pico
- AIC Pico: https://github.com/whowechina/aic_pico
- Groove Pico: https://github.com/whowechina/groove_pico
- Geki Pico: https://github.com/whowechina/geki_pico
这个 Geki Pico 项目:
- 大量依赖 3D 打印,所以你需要一个 3D 打印机。
- 需要具备焊接细小元器件的能力。
声明
我在个人时间内制作了这个项目,没有任何经济利益或赞助。我将继续改进这个项目。我已尽我所能确保所有内容的准确性和功能性,但总有可能出现错误。如果你因使用这个开源项目而造成时间或金钱的损失,我不能负责。感谢你的理解。
关于许可证
它是 CC-NC 授权。所以你只能给自己和你的朋友 DIY,不能利用这个项目赚钱。
如何制作
PCB 和相关器件
-
前往 JLCPCB 下单,使用最新的
Production\PCB\geki_main_xxx.zip文件,选择常规 FR-4 板材,黑色或者白色均可,厚度为 1.6mm。
-
1x 树莓派 Pico 或者引脚 1:1 全兼容的克隆版本。
https://www.raspberrypi.com/products/raspberry-pi-pico -
1x USB Type-C 插座 (918-418K2023S40001 或 KH-TYPE-C-16P)
-
35x WS2812B-4020 侧向发光 RGB LED (D2-D36)。焊接的时候注意朝向,D2 ~ D44 和 D34 ~ D36 是朝侧面发光,其他的则都是朝上发光。
https://www.lcsc.com/product-detail/Light-Emitting-Diodes-LED_Worldsemi-WS2812B-4020_C965557.html -
2x WS2812B-3528 RGB LED (D1, D37).
-
2x 8002A 迷你音频功放板 (AMP1, AMP2), 如果买不到现成的模块,你也可以对照电路图使用全分立元件 (R4, R5, R8, R9, C9 ~ 12)。
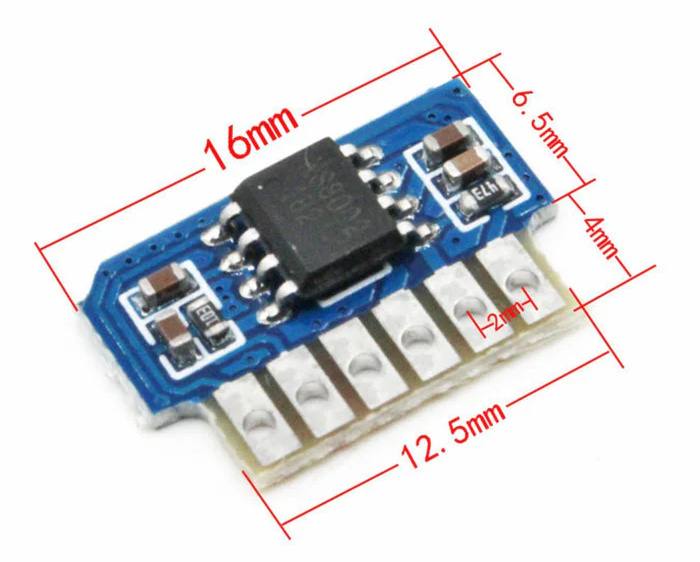
https://www.nz-electronics.co.nz/products/4pcs-one-sell-3v-5v-supply-voltage-3w-8002-audio-player-power-amplifier-module-board-pcb-mono
https://www.ebay.com.au/itm/225481264605 -
2x VL53L0x ToF 距离传感器, 最好也把光学盖片买上。
https://kuriosity.sg/products/time-of-flight-tof-distance-sensor-vl53l0x-200cm-with-optical-cover
https://www.smart-prototyping.com/VL53L0X-ToF-Distance-Sensor -
2x 小扬声器,不要大于 20mm*20mm*5mm, 8ohm 或者相近的阻抗, (SPK1, SPK2), 买不到的话也可以从旧的电子玩具里拆。
可以在搜索引擎里试试搜索 “贴片 扬声器 1540”。 -
1x SS49E 线性霍尔传感器 (U5).
https://mou.sr/4gDuQKu
https://www.digikey.com/short/fmm54dzq -
1x 迷你的 3V 到 5V DCDC 转换器,升压或者升降压的都可以 (U6)。注意输出一定要 5V,输入电压范围要能够覆盖 3.3V。如果你买到的模块引脚不对,你需要手工飞线。
https://www.dfrobot.com/product-1766.html -
8x 0603 0.1uF (0.1~1uF 都可以) 电容 (C1 to C8), 可选,但是建议都焊上。
-
2x 0603 5.1kohm 电阻 (R1, R2) ,给 USB 口用的.
-
1x 0603 10ohm 电阻, (1-20ohm 都可以的) (R3).
-
1x 0603 10kohm 电阻 (R6).
-
1x 0603 20kohm 电阻 (R7).
-
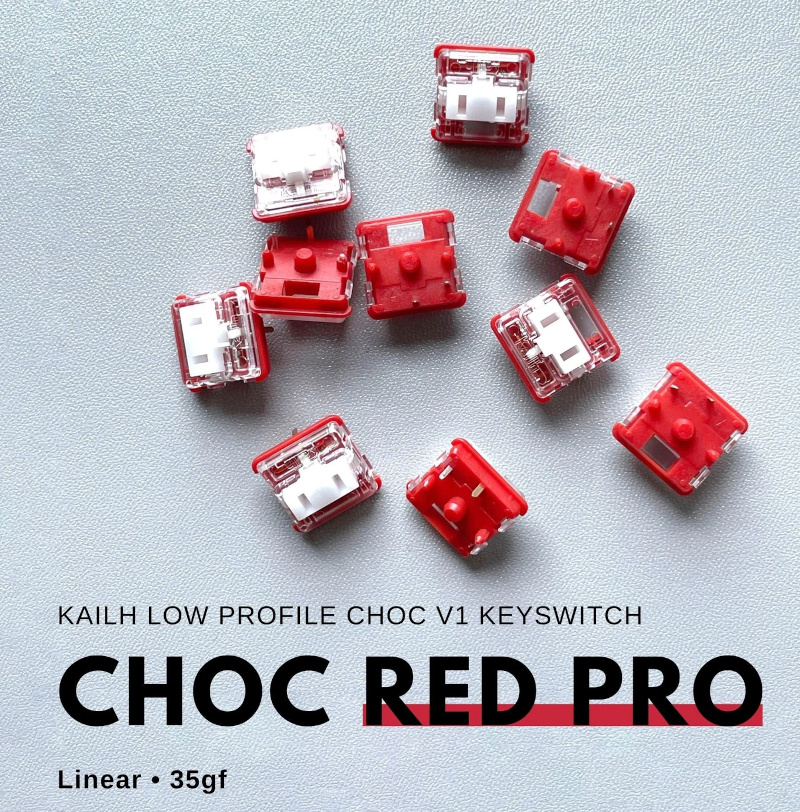
8x 凯华巧克力 v1 或者 v2 矮键轴(其中 2 个必须是 v1)。记得选线性轴,比如 "Red Pro" 或者最新的洛斐定制的幽灵轴。
-
1x PN532 NFC 模块 (红色大方块那个,便宜的克隆版本也很好用)。可选,如果你希望内置读卡器,那就要用到。
https://www.elechouse.com/product/pn532-nfc-rfid-module-v4/ -
如果你使用 8002A 的成品模块板子,那么 R4, R5, R8, R9, C9 ~ 12, U3, U4 都空着不焊。
-
U2 空着就好,它用于稳定 ADC 参考电压,心理作用为主。
-
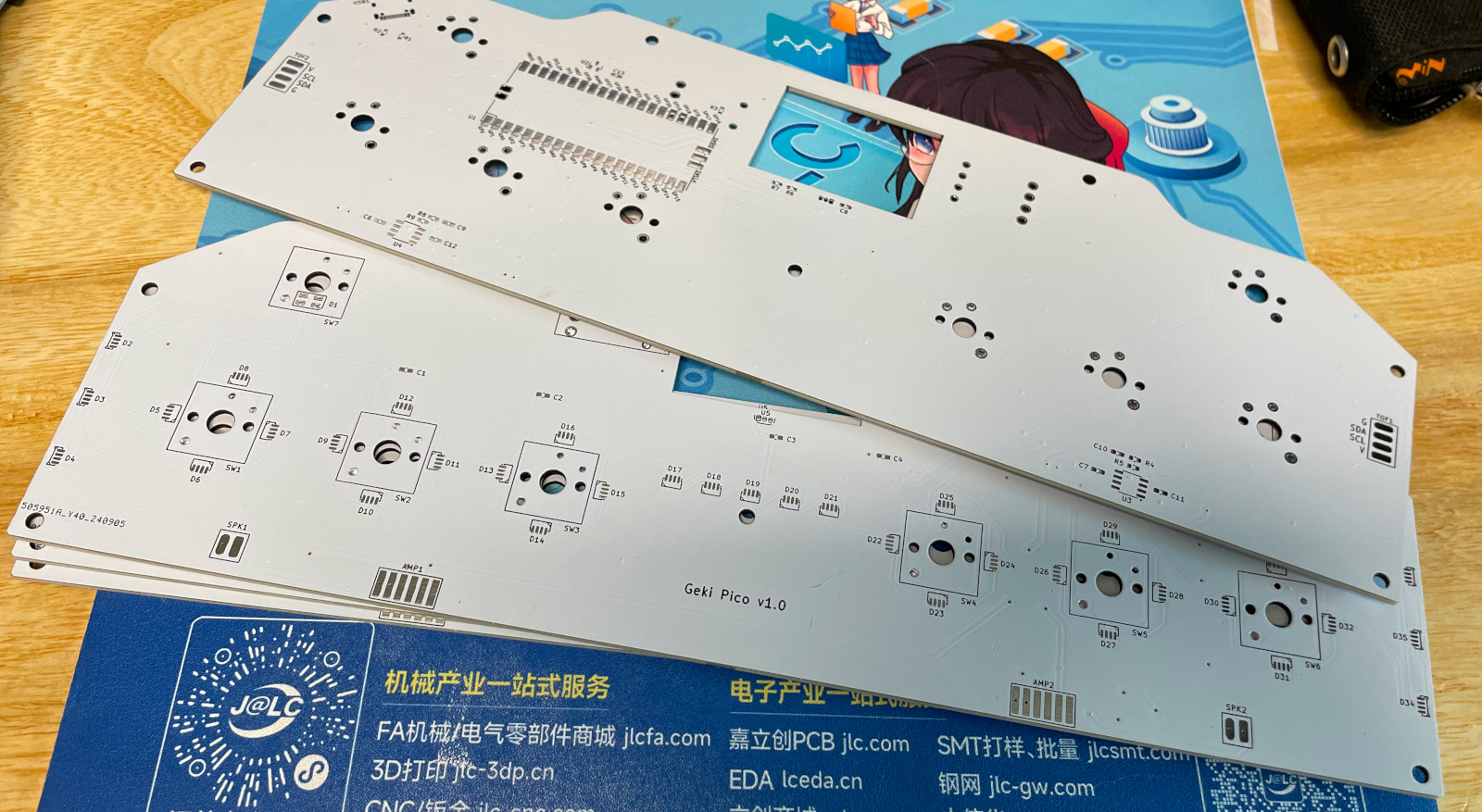
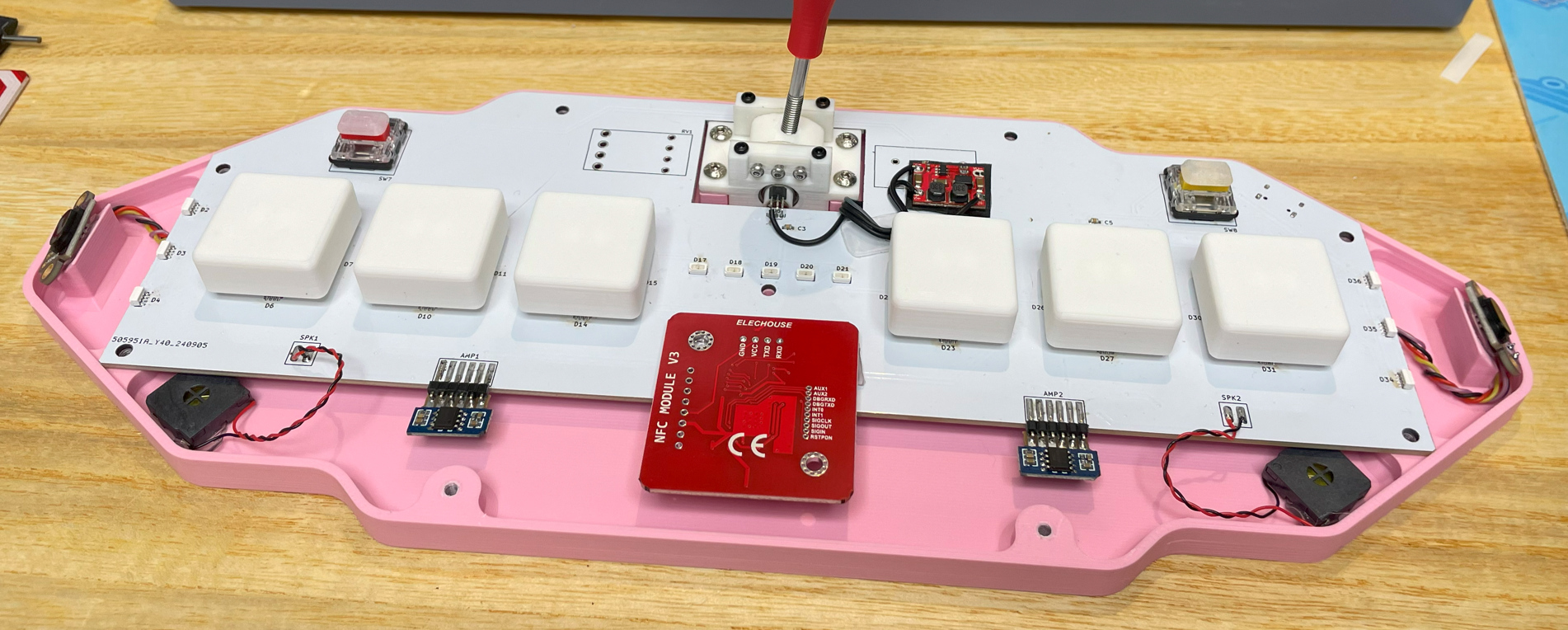
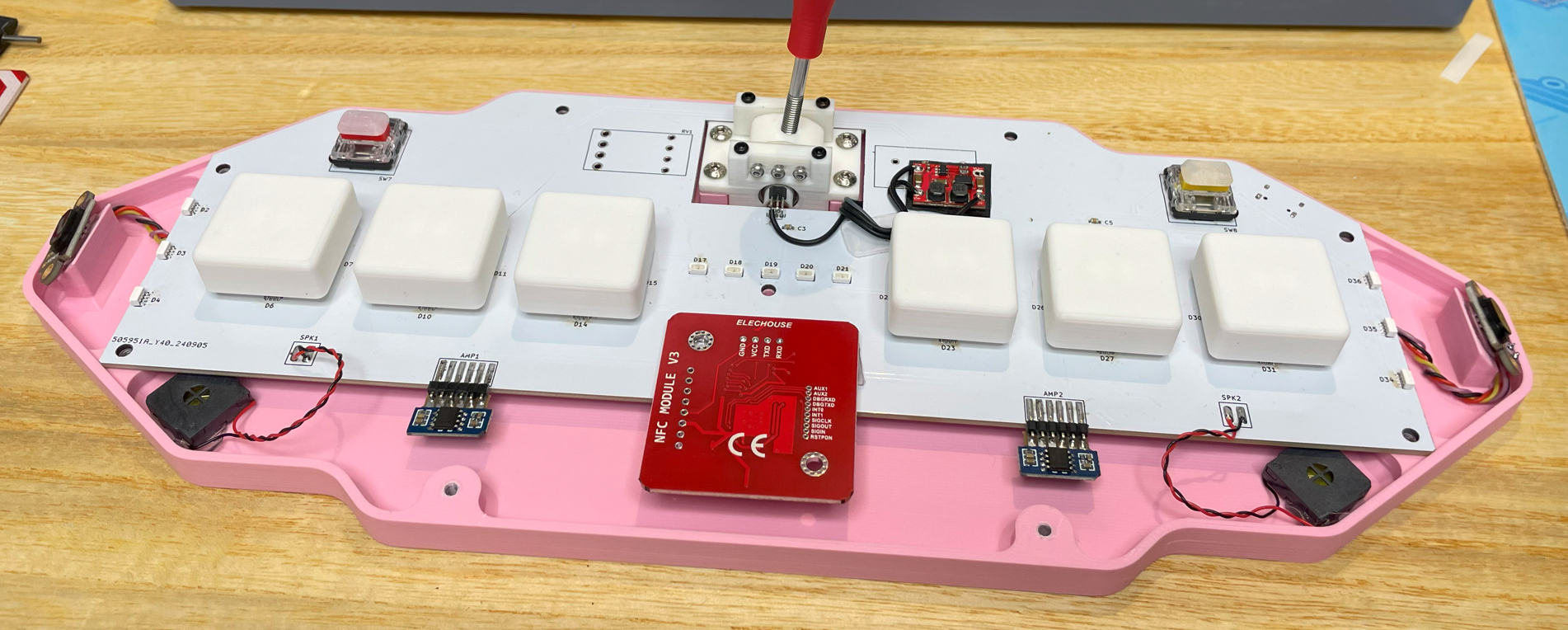
全部焊接完以后是这个样子,注意这是 v1 版本的 PCB,后续版本有一些优化。
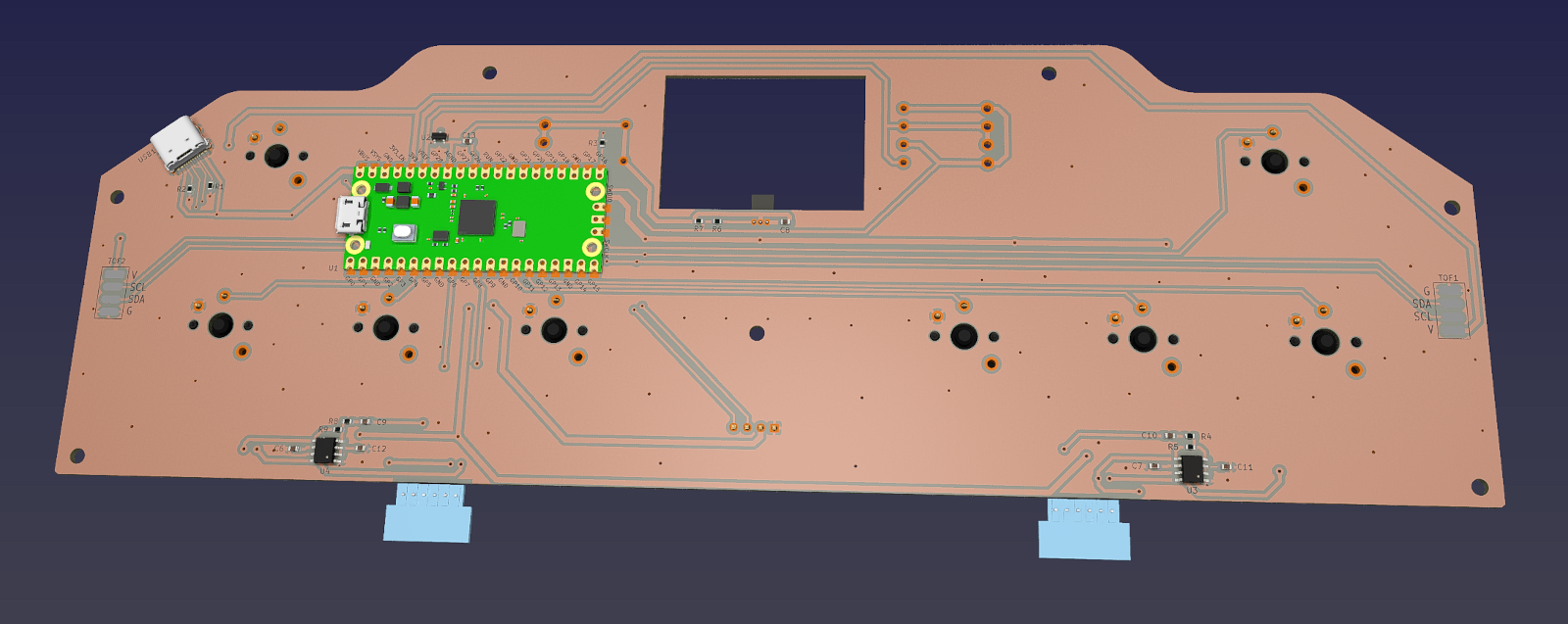
-
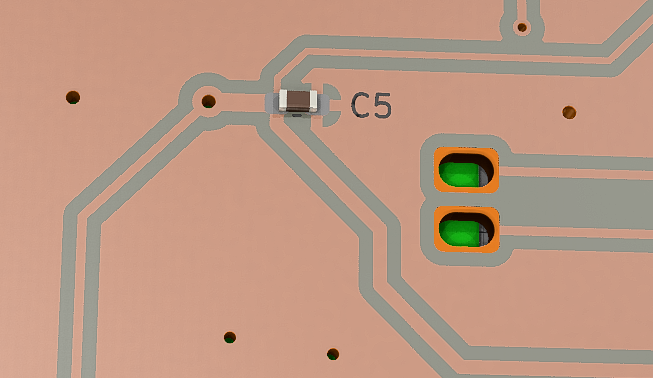
小心这两个小焊接孔,一般容易忘记焊接它们,或者在焊接过程中留下气泡。为了避免这种情况,从孔的一侧开始慢慢焊接,使用很少的焊丝和较多的焊剂。
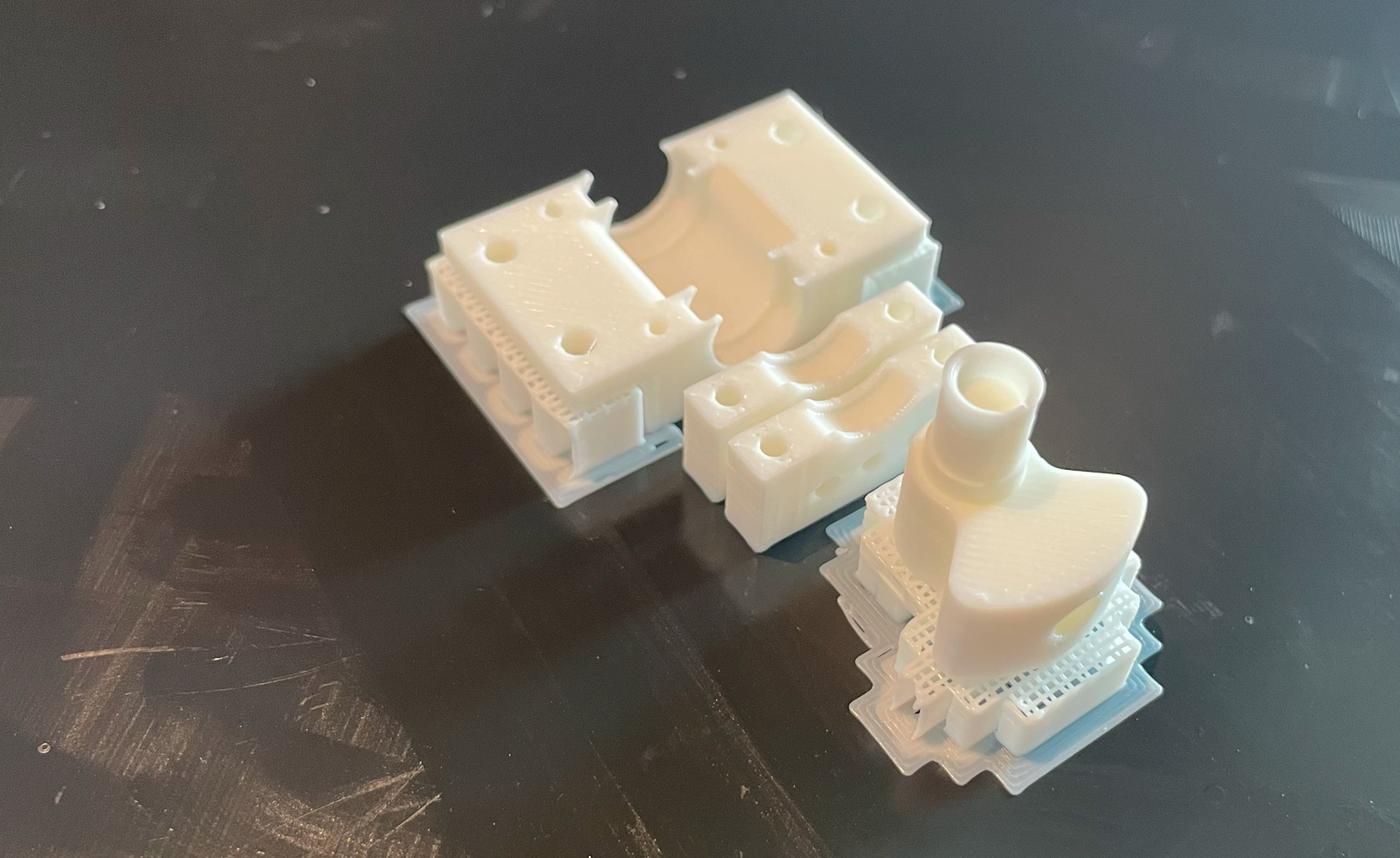
3D Printing
- 打印参数
- PLA, PETG 都可以.
- 层高:0.2 毫米
- 支撑:始终需要
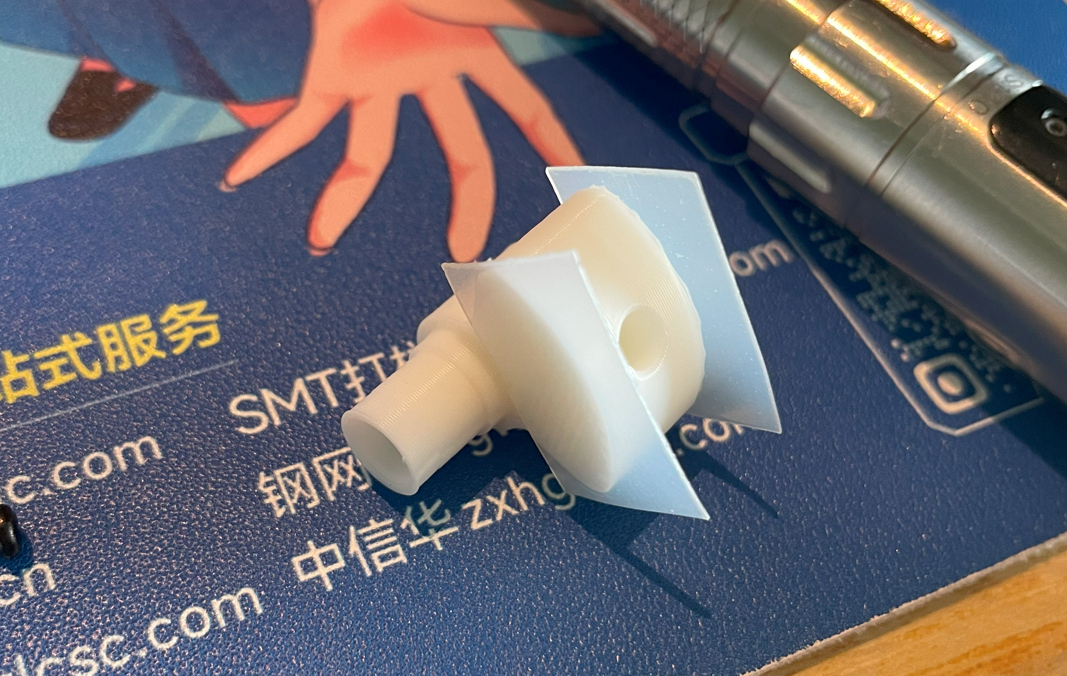
摇杆部分
- 摇杆底座:
Production\3DPrint\geki_pico_lever_base.stl, 白色. - 摇杆转轴:
Production\3DPrint\geki_pico_lever_shaft.stl, 白色. - 2x 轴承固定器:
Production\3DPrint\geki_pico_lever_fixer.stl, 白色. - 摇杆手柄:
Production\3DPrint\geki_pico_lever_handle.stl, 红色.
外壳部分
你需要在 Z 轴上旋转 135 度来适应热床。
- 外壳底部:
Production\3DPrint\geki_pico_bottom.stl, 我用了樱花粉,你选什么颜色? - 外壳支撑:
Production\3DPrint\geki_pico_support.stl, 半透明,如果你没有 ToF 的光学盖片,或者你对盖片的性能不满意,那用这个文件代替:geki_pico_support_no_cover.stl。 - 外壳上部:
Production\3DPrint\geki_pico_top.*, 白色。如果你有多色打印的设备和技巧,那用 3mf 后缀那个,按钮框和 Logo 是黑色的。
按钮帽
- 6x 主按钮帽:
Production\3DPrint\geki_pico_button_main_choc_*.stl, 白色,要上下颠倒打印,记得根据巧克力矮轴的 v1 或者 v2 版本选择正确的文件。 - 2x 辅助按钮帽:
Production\3DPrint\geki_pico_button_aux.stl, 半透明,也是上下颠倒打印。
摇杆
-
需要的零件
- PTFE 或者 UHMW 胶带, >=10mm 宽度, >=0.3mm (0.5mm 最好) 厚度, 单面自粘。
https://www.3m.com/3M/en_US/p/d/b40072069/ - 2x 6700zz 轴承 (10mm 内径, 15mm 外径, 4mm 厚度).
https://www.amazon.com/Bearing-10x15x4-6700ZZ-MOCHU-Bearings/dp/B081Z6419H - 1x 双头螺栓,M4 螺纹,80mm 总长度。
https://www.amazon.com/METALLIXITY-Double-Screws-Stainless-Threaded/dp/B0B7BX3CYH - 1x 5mm*2mm 或者 5mm*3mm 圆形小磁铁,必须是径向充磁的,也就是磁铁两极是在圆弧面上。
https://wargameportal.com/products/special-diametrically-magnetized-50pcs-5mm-x-2mm-3-16-x-1-16-disc-magnets?variant=49014932209942 - 6x M2*5mm 螺丝 用于阻尼调整。
- 4x M2*16mm 螺丝 用于固定轴承。
- 可选: 键轴润滑剂。
- PTFE 或者 UHMW 胶带, >=10mm 宽度, >=0.3mm (0.5mm 最好) 厚度, 单面自粘。
-
组装过程
- 打印相关的零件

- 把 PTFE/UHMW 胶带贴在摇杆和轴的滑动表面上,然后大致修剪成相应的形状。如果你有键盘轴润滑剂,可以在滑动表面涂一丁点。然后把 M2*5mm 螺丝半拧入轴承固定器,注意不要拧紧。
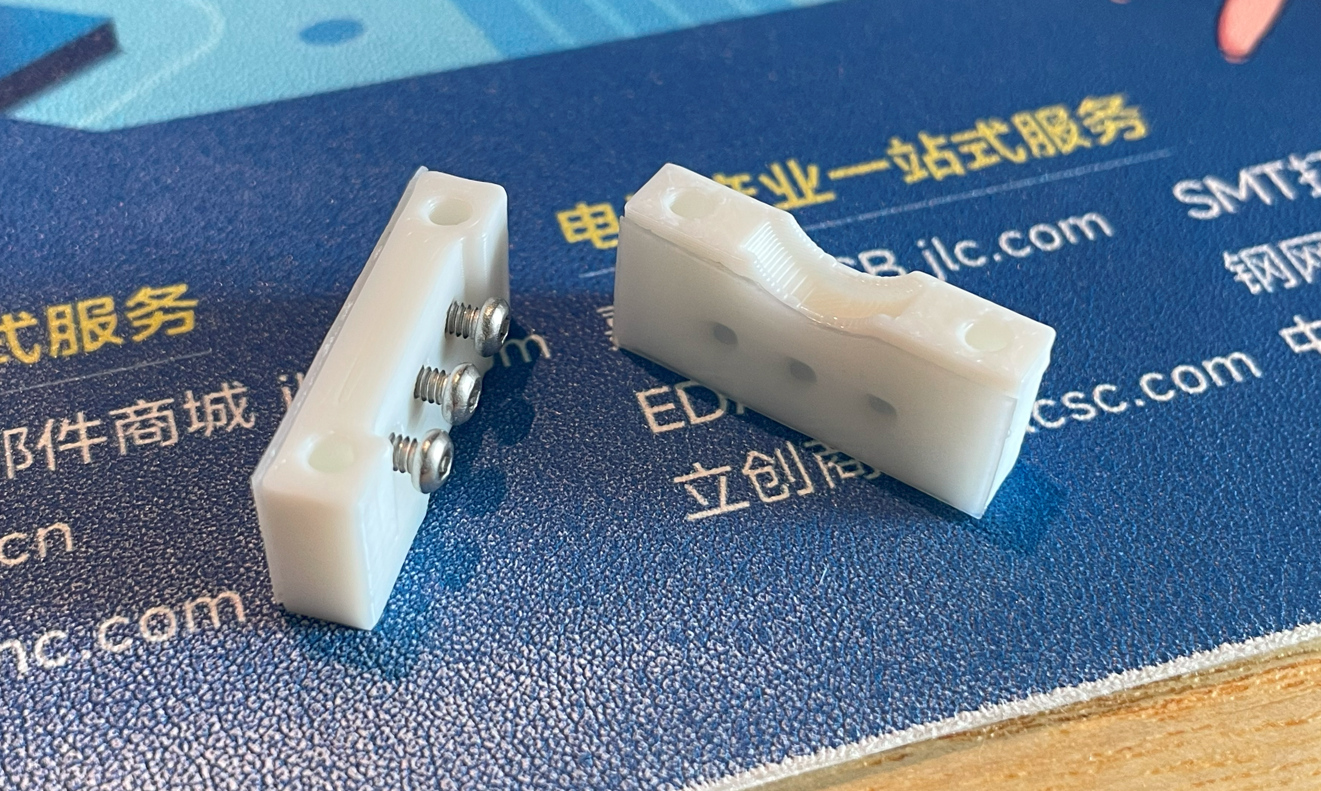
- 把 2 个轴承固定器固定在底座上,然后用 M2*16mm 螺丝固定轴承。

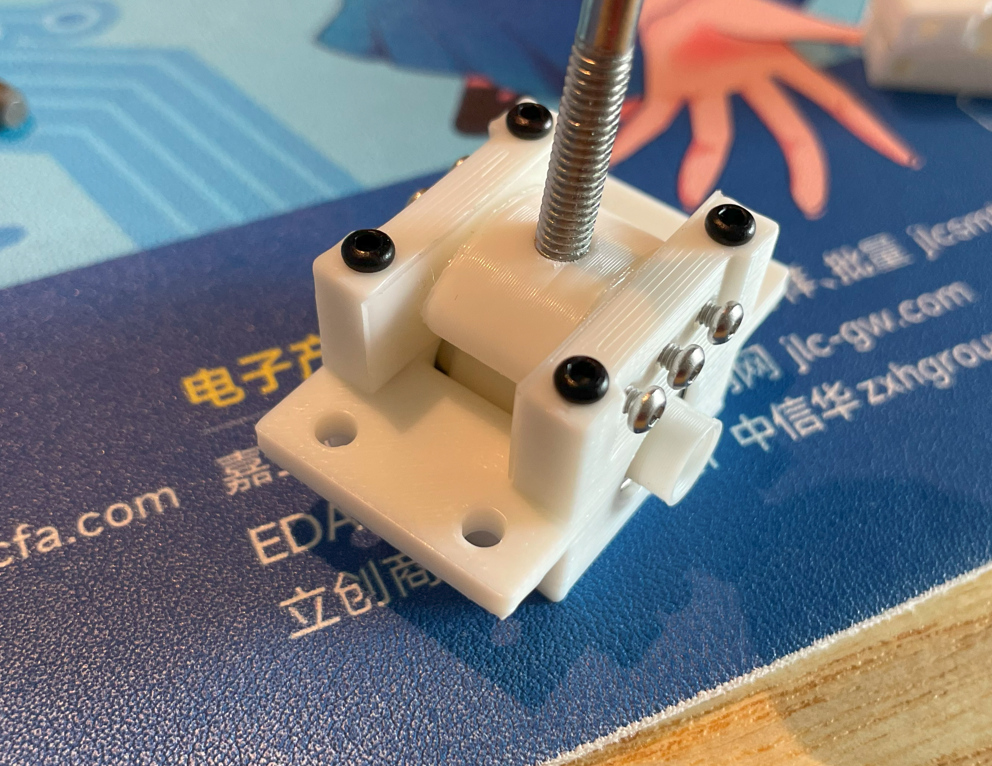
- 用 502 等快干胶把磁铁粘到旋转轴的底部。注意磁铁的极性朝向要尽量水平。你可以先把几个磁铁连在一起,然后画一条线穿过所有的磁铁,这样你就知道极性方向了。

- 把摇杆的手柄安装到螺栓上,先放到一边,后面等外壳都装好后再拧到轴上。
- 打印相关的零件
组装
-
其他需要的零件
- 4x M3*8mm 螺丝 用来把摇杆总成装到底部。
- 8x M3*20mm 螺丝 用来固定外壳。
- 3M VHB 或者类似的神奇双面胶用来固定 ToF 传感器和扬声器。
- 一些细软的电线,用来连接 ToF 传感器和扬声器。
-
步骤
- 用 M3*8mm 螺丝把摇杆总成固定到底部。
- 把 ToF 传感器焊接到主 PCB 上,每个需要 4 根线。
- 用 VHB 胶带把 ToF 传感器固定到底部的两侧座位上。
- 把扬声器焊接到主 PCB 上,每个需要 2 根线。
- 用 VHB 胶带把扬声器固定到底部的地板上。
- 把 PCB 安装到底部上,不需要螺丝。
- 把 PCB 上的霍尔传感器 (SS49E) 弯曲到摇杆磁铁的上方。记得留一点间隙让轴能自由移动。

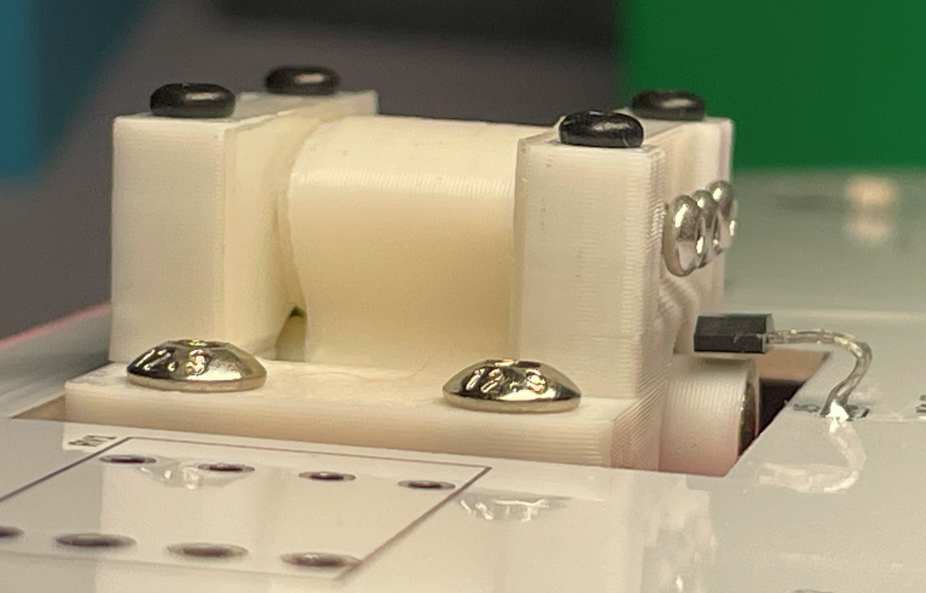
- 如果你还没有焊接 PN532 模块,8002A 模块到主 PCB 上,现在就该焊上了。
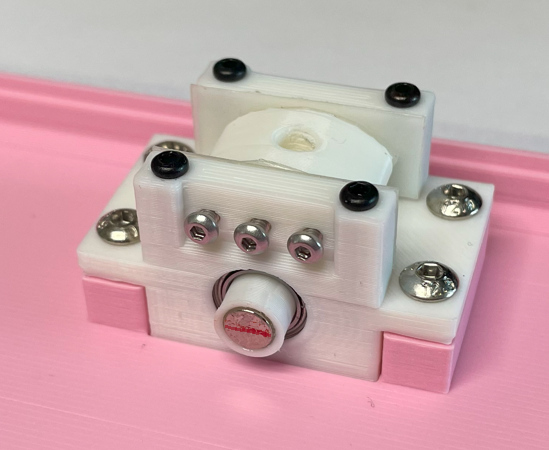
- 把主按钮帽和辅助按钮帽安装到键轴上。
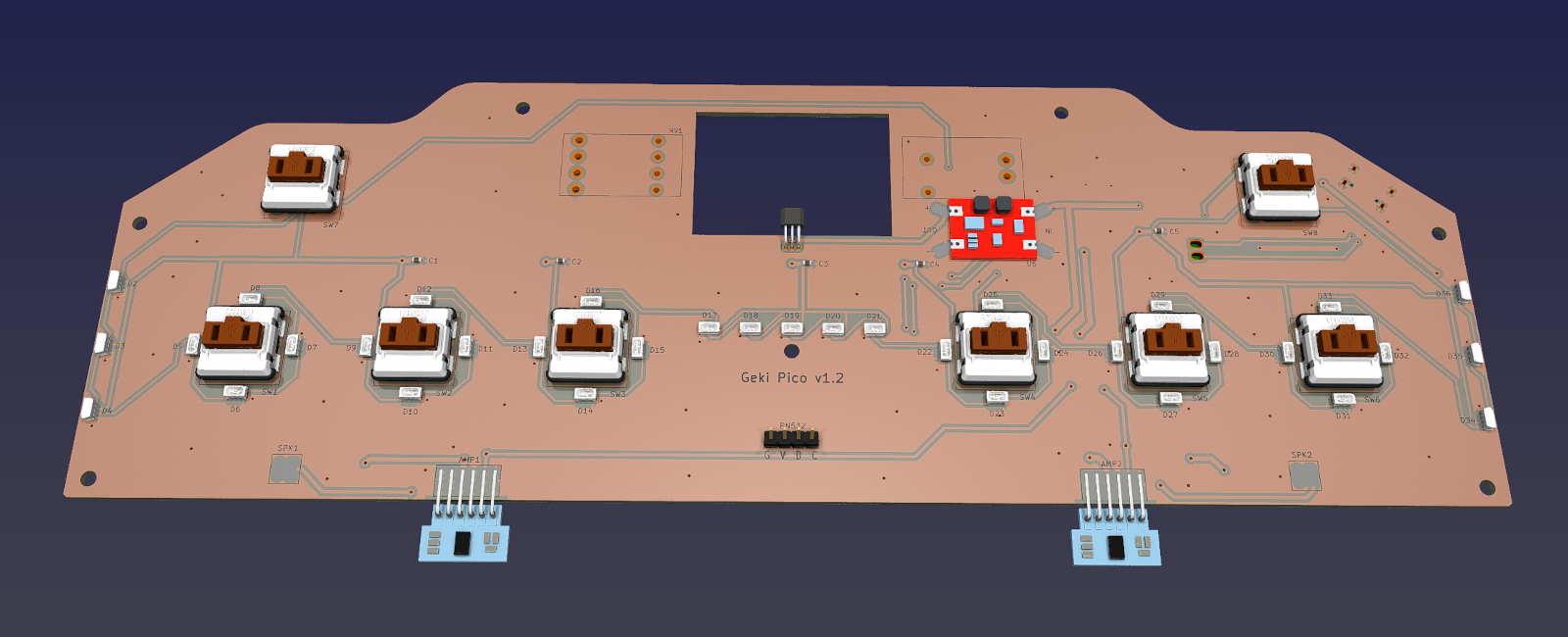
- 现在看起来是这样的。请注意图片中是 PCB v1 版本,后续版本有一些优化。
- 现在是调整摇杆阻力的最佳时机。慢慢小心地转动 M2 螺丝来调整滑动表面的张力,记得要均匀地调整所有相关螺丝。
- 把支撑部分放到底部上,然后把上部放到支撑部分上。
- 外壳对齐后,用 M3*20mm 螺丝把它们固定在一起。注意要小心地调整 ToF 传感器的位置,让 IR 盖片(或者微小的传感器)能够完全进入支撑部分上的窗口。
- 最后把带手柄的摇杆拧到轴上。
固件
- UF2 文件在
Production\Firmware文件夹下。 - 全新烧录的话,按住 Pico Pi 的 BOOTSEL 按钮,然后连接 USB 到 PC,会出现一个名为 "RPI-RP2" 的磁盘,将 UF2 固件二进制文件拖入即可。Geki Pico 的底部有一个小孔,它正对着 BOOTSEL 按钮。
- 如果已经烧录了 Geki Pico 固件,后续你可以在命令行使用 "update" 命令进行更新,或者按住至少 4 个按钮后连接 USB 进入更新模式。
- 要访问命令行,你可以使用 Web 串口终端工具来连接到 Geki Pico 提供的 USB 串口。(提醒:"?" 命令可以查看帮助)
https://googlechromelabs.github.io/serial-terminal/
使用
- 烧录固件后,需要使用 "lever calibrate" 命令来校准摇杆。
- 如果你觉得摇杆方向不对,可以使用 "lever invert <on|off>" 命令来调整。
- 声音反馈的音量可以用 "volume <0~255>" 命令来调整。
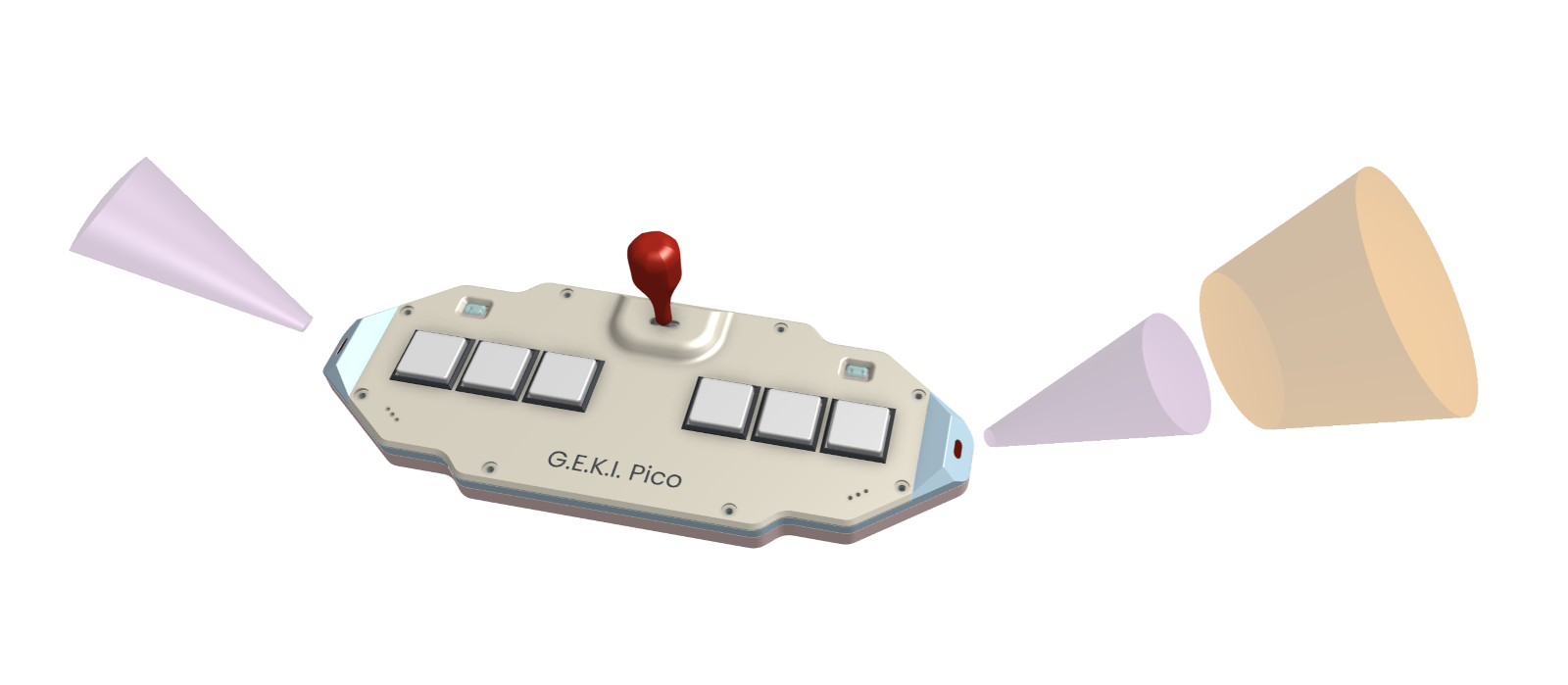
- ToF 传感器有不同的触发区域,图中紫色区域用来触发侧面按钮,橙色的区域用作 SHIFT。
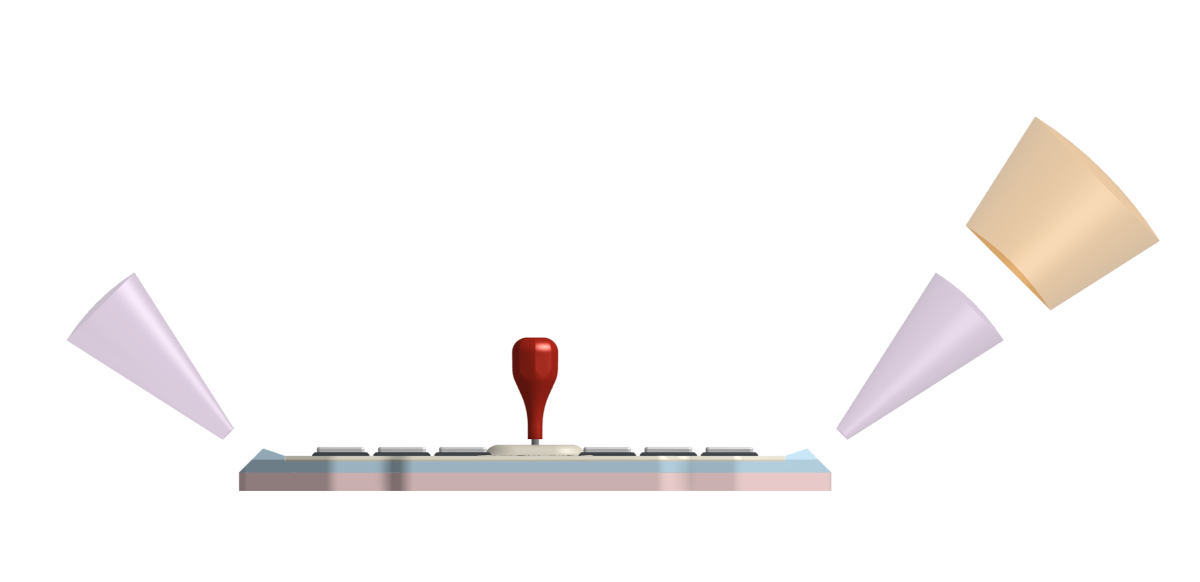
- 为了模拟 IO4 的 TEST/SERVICE/COIN 这些按钮和功能,你可以把手放到 SHIFT 区域,当你看到控制器两侧指示灯闪烁的时候,两个辅助按钮就变为了 TEST 和 SERVICE,摇动摇杆则是“投币”。
- AIME 在第二个串口端口,你可以设置工作模式或者开关虚拟 AIC 功能。
CAD Source File
我使用的是 OnShape 的免费订阅。它很强大,但是它不能将原始设计存档到本地,所以我只能在这里分享链接。STL/DXF/DWG 文件是从这个在线文档导出的。
https://cad.onshape.com/documents/eb38f3add988969c42b50060/w/86bcbeae8562f01c1a81c53e/e/feecb6f371a076c968584d3c